Robotic actuators have always forced a choice. You can have strength or sensitivity, power or mobility, but not both in one component. That’s why humanoids still rely on heavy motors, gearboxes, and external sensors stitched together to fake what a single muscle does naturally. Two new papers just hit, and together they look like the closest thing yet to an actual muscle analog for robots.
The first, published in PNAS, introduces HARP, a Helical Anisotropically Reinforced Polymer actuator. It solves the mechanics side. Contraction ratios up to 75%, power density of 1.93 kW/kg, 29% energy efficiency. What makes it different is that the design is decoupled, meaning the same framework can be tuned for low-pressure actuation, abrasion resistance, or low hysteresis depending on what you need. That’s a versatile platform, not a one-off.
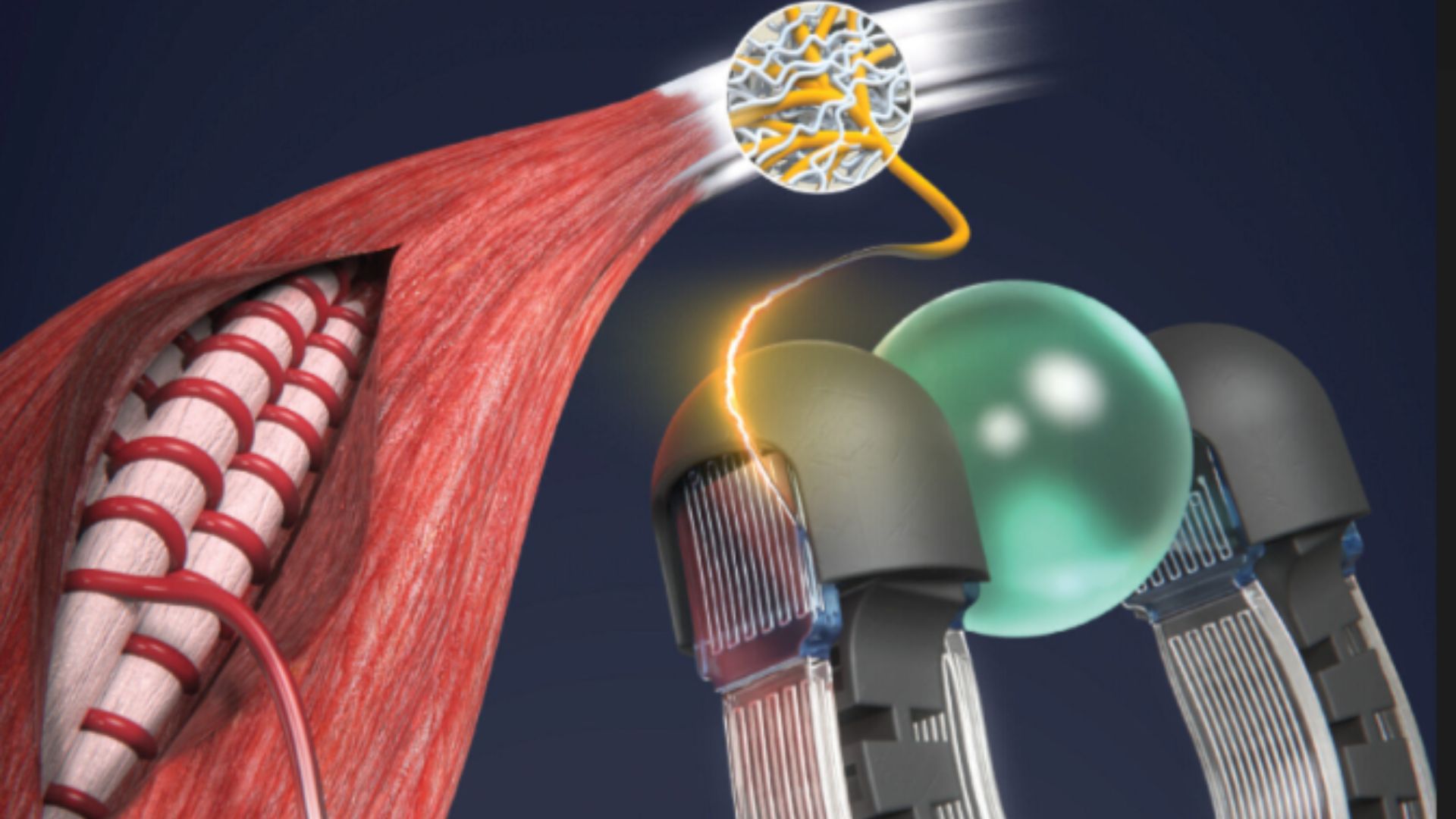
The second comes from Seoul National University. They embedded liquid metal channels inside a liquid-crystal elastomer to build a muscle that actuates AND senses in the same structure. One channel contracts when heated. Another reads force and deformation in real time. No external sensors, no separate nervous system to wire up. The mechanical layer and the sensing layer are the same layer.
This is the part that makes the combination interesting. HARP solves how to move with strength and efficiency. The SNU work solves how to feel what you’re doing while moving. A robot built from materials like these starts to look less like a machine pretending to have muscles and more like something with actual muscles. Strength, sensitivity, and proprioception in one component instead of three subsystems bolted together.
It’s still early. The SNU design has heat-buildup problems that cause drift over repeated use. HARP is a platform, not a deployed product. Neither is showing up in a humanoid this year. But this is the shape of what comes next. The mechanical side and the sensory side closing in on the same physical substrate. That’s how you eventually get robots that move and react like animals do.